The research note compares the USB and Raspberry Pi V2 cameras that are typically used for the community microscope.
Four different observations were made. The first observation compares the FOV without any camera modifications and has different lenses. The other three observations compare FOV with the same lens. Measurements were calibrated against a .5x.5 inch grid or with a 1 micron calibration reference slide.
1) Comparison with supplied /standard lens --Raspberry Pi visible V2 detector with Lens FOV (59.17 deg (H)×58.3 deg (V)) --USB WebCam, detector and lens to be determined
2) Comparison with USB Webcam lens on both cameras --Raspberry Pi detector with USB Webcam Lens --USB WebCam, detector with USB Webcam Lens
3) Comparison with 2.8 mm lens on both cameras --Raspberry Pi detector with 2.8mm Lens --USB WebCam detector with 2.8mm Lens
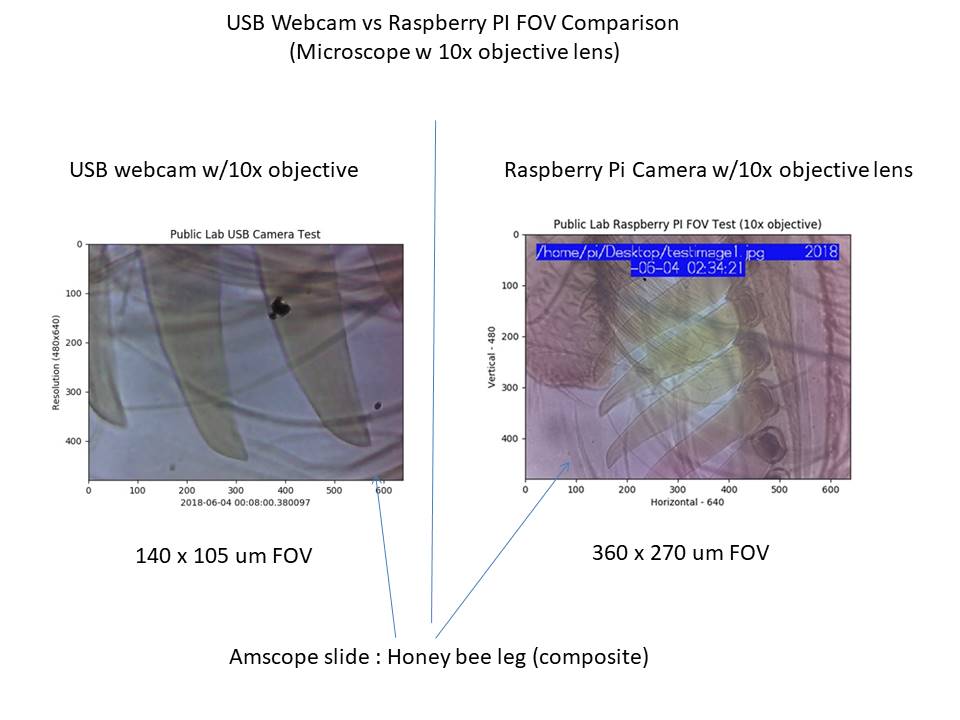
4) Microscope comparison on both cameras with 10x objective.
1) Comparison with supplied /standard lens –This comparison provides the ‘as is’ comparison of the two cameras.
2) Comparison with USB Webcam lens on both cameras
The raspberry Pi detector was fitted with a M12 mount so a comparison could be made between cameras with the same USB Webcam (M12) lens. Pictures below show that Raspberry PI images never came into focus. Potential explanation is that the resolution of the Raspberry Pi detector is better than the USB webcam lens or that the M12 lens holder does not permit the lens to achieve focus. ( See https://publiclab.org/notes/MaggPi/04-08-2018/raspberry-pi-microscope-close-up-lens-system for M12 lens mount description.)
3) Comparison with 2.8 mm lens on both cameras. A 2.8 mm lens was used for both the Raspberry camera and USB Webcam. FOV Results are similar to comparison #1. Lens distortion indicates the better quality of the Raspberry PI standard lens.
4) To compare cameras with the same microscope objective lens, a celestron microscope was modified to hold the Raspberry Pi or USB detectors. Pictures below show a calibration slide and honey bee leg that was imaged with the same 10 objective lens.
The Raspberry camera also has the option to display high resolution modes while the USB camera is limited to 640x480 resolution.
Summary
Raspberry PI detector always has a FOV greater than the USB webcamera no matter what lens is used.
For 10x microscope objective (used with the celestron microscope) the USB Webcam has 140 x 105 micron FOV vs the Raspberry Pi which has a 360 x 270 micron FOV.
Recommendations:
Comparing results from #1 vs #3 indicates the Raspberry PI lens provides better quality than other lenses. Additional work could explore whether the lens could be used in the reverse mode. This may provide a low cost (non- microscopic objective) lens option for the community microscope with raspberry pi camera.
6 Comments
Fantastic note! Lots of good info on fisheye correction here, too: #fisheye
Reply to this comment...
Log in to comment
Just interested to see - could you modify the above images so the Pi versions show an outlined box where the smaller FOV of the webcam covers? It'd be a great way to visually/intuitively show the difference in fields of view.
Great work here!
Is this a question? Click here to post it to the Questions page.
Reply to this comment...
Log in to comment
Also, I added a few tags -- @amirberagain, you may want to "follow" the tag #pi-camera to get email updates for @maggpi's posts?
Is this a question? Click here to post it to the Questions page.
Reply to this comment...
Log in to comment
Great work @Maggpi, and I took you up on your offer @Warren. A couple of relevant resources explaining the differences you mentioned in this post: Edmund optics on distortion: https://www.edmundoptics.com/resources/application-notes/imaging/distortion/ It's very likely that the webcam doesn't show the same distortion as the pi as it has a smaller sensor and so doesn't cover the places where the main part of the distortion is. When it comes to comparing sensor sizes (and some other parameters): https://www.edmundoptics.com/resources/application-notes/imaging/understanding-camera-sensors-for-machine-vision-applications/
BTW: if you want a hard copy (and don't mind getting one in the mail for all eternities) you can request them to send you a catalog, those usually have an intro with great explanations and examples.
Reply to this comment...
Log in to comment
@warren,@amirberagain, @icarito please see FOV inset comparison below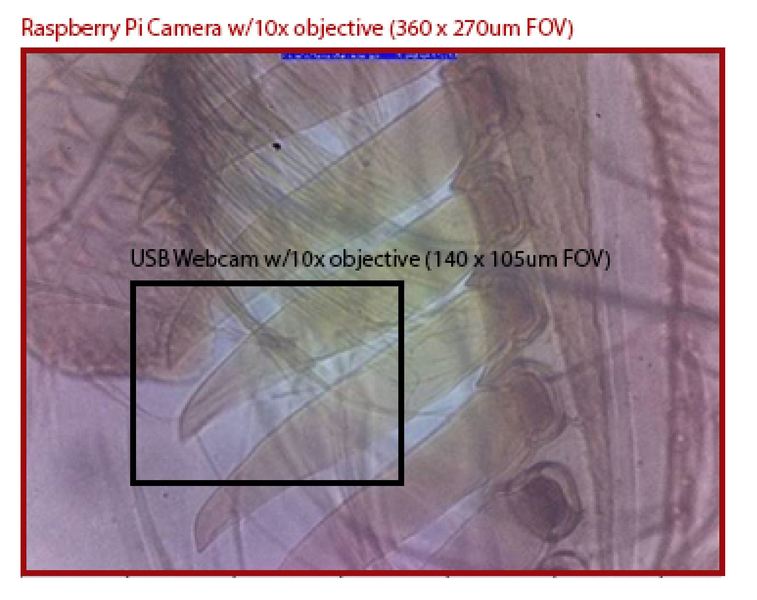
Reply to this comment...
Log in to comment
This is super!
Reply to this comment...
Log in to comment
Login to comment.