What I want to do
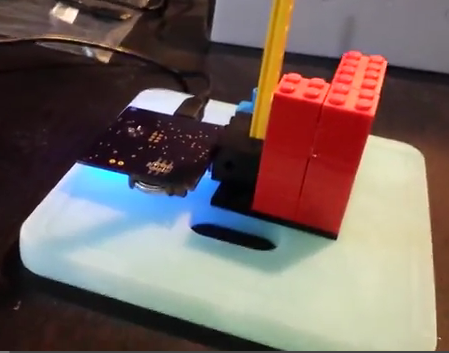
Roughly measure the rate of change in the reading from the MLX90614 as distance increases, and to use Lego pieces to do it.
A theoretical discussion can be found in this Arduino forum post, but I thought it'd be nice to see it in action.
My attempt and results
A video of my experiment is up on YouTube:
Each quarter turn of the Lego device is approximately 7mm further. The baseline measurement was at approximately 1cm.
Questions and next steps
- Audio feedback
- Output serial to Raspberry Pi
- Averaging temperature
Why I'm interested
Folks need to know how sensitive this device is in order to use it. Holding the Thermal Flashlight a centimeter away from the object will give different results than 3 centimeters, possibly enough to affect decisions, so users should be aware of that.
8 Comments
This is fantastic! I didn't know there were Lego parts that did that sort of height adjustment thing :)
Your results are really important -- so now we're going to need to think about some way of keeping the sensor a set distance away from a wall, if e.g. we're using the device to 'scan' the inside surfaces of an apartment for thermal leaks. Maybe a cardboard tube?
Is this a question? Click here to post it to the Questions page.
Reply to this comment...
Log in to comment
There are Lego bricks for just about anything :)
I was thinking that, since there are screw holes in the corners of the board already, flat topped screws or bolts could be used to create 'legs' that keep the thermal flashlight a constant distance from the wall. One could even add a little felt or other softening surface to reduce friction and the chance of gouging the wall. Similarly, a small plastic frame could probably be 3D printed without too much effort
Reply to this comment...
Log in to comment
This is a really neat idea. thanks for working on this distance calibration.
I have a stud finder that has felt on the bottom, and sounds similar to what you're thinking of for a wall mounting It has an LED protruding from the top, away from the spot that my hand holds against the wall. I'm sure a similar setup would work well.
also, there are wall climbing remote control toy cars that cost $15-25. Watch this one drive on the ceiling. I don't know if they could carry a payload.
Is this a question? Click here to post it to the Questions page.
Reply to this comment...
Log in to comment
Mathew -- I have never been so eager to follow a missing link -- where's the wall-climbing remote control toy car?! :)
Wait a minute -- are you suggesting -- automatic thermal imaging done by a Roomba for vertical surfaces? ZOMGosh!
If we have trouble sending our Vertical Roomba up a glass window, we could try the techniques they used for the snail robot (Warning: video may contain depictions of artificial mucus.)
It would be pretty sweet to set up motors and strings on the x- and y-axis above a wall, and, keeping track of the sensor's position, develop a picture of the wall's thermal profile over time. A wall scanner.
Also -- I think there are versions of this IR sensor part we're using that have different ranges / sensing profiles ... from what I remember, they use varying heights of the 'can' on top of the sensor in order to narrow the 'field of view' -- could we set up a sensor on an x/y servo platform and scan a wall?
Is this a question? Click here to post it to the Questions page.
Reply to this comment...
Log in to comment
If we can determine the change in reading to be purely a function of distance alone, perhaps adding an ultrasonic rangefinder to the IR sensor/servo combination could give the necessary information to compensate for changes in temperature reading as the servo rotates... the function would need to be well defined, and would probably exist with some relatively compact set of spatial limits, but perhaps those would be bigger than the average room.
Or, better yet, Vertical Roomba!
Reply to this comment...
Log in to comment
Sekjal, It would be really cool to have a rangefinder, but they're pricey sensors, and might significantly up the cost of the board.
Don- I fixed the link above, the car is an "Air Hogs Zero Gravity" thing. I think it will work on glass, but it only likes smooth surfaces, the snail might be best for rough ones.
Reply to this comment...
Log in to comment
Mathew -- AIR HOGS! Just watched the video -- WHUUUT!! We've got to do this! That's so much fun! We could be sampling the entire room remotely! (Where do you find these links?!)
Sekjal -- I watched your (awesome) video again, and at the end you point out that we don't know how much the temperature of the cold pack may have changed (warmed up) in the interim. I guess one simple thing would be to test e.g. a cold window pane, the temperature of which we think won't be changing much ...
... but it also occurred to me that we do have voltage divider circuitry on the board intended for measuring a thermistor voltage (originally intended for the thermal fishing bob application. We could add a $3 thermistor probe, like [this one], add the appropriate resistor (3 K, in the case of that linked-to thermistor). That thermistor is 4 feet long and coated in teflon, and works well between -55 C and 125 C. We could be measuring the 'contact' temperature of an object at the same time that we're measuring the 'remotely sensed' temperature ... maybe useful for calibrations like the one you're attempting here, and also for other fun projects .... e.g., checking the temperature difference between e.g. the inner core and outer surface of a bread pudding fresh out of the oven .... science!
Is this a question? Click here to post it to the Questions page.
Reply to this comment...
Log in to comment
@sekjal. I was amazed by the use of Lego. I wanted to ask you if it was possible to make a wall riding car similar to one shown by @Mathew or this slim version of the wall climbing car using Arduino alone? This one uses a quick charging module. I am not interested in that. However, in future I would like to take this project to a new level where I can integrate a miniature solar panel on the car ceiling. Is that an overkill? Any thoughts on that?
Is this a question? Click here to post it to the Questions page.
Reply to this comment...
Log in to comment
Login to comment.