Hello fellow mappers! I run a website called flightriot.com, which is devoted to advocating purpose driven uses of geospatial technology in personal Unmanned Aerial Vehicles (UAV), with a particular focus on mapping and 3D modeling applications. A major current goal is to complete an aerial imagery post processing open workflow (free for research, education, and personal use) and publish the results for others to use.
The reason I think this information is so relevant to folks at Public Lab is that the methodologies and resulting data sets are directly applicable to balloon and kite mapping applications.
So, the purpose of this research note is simply to share the progress I've made with Public Lab with the intent of benefiting those performing kite and balloon mapping. Also, anyone that is new to personal UAVs for mapping will benefit as well.
Currently, there are two available tutorials that you can find on youtube and flightriot.com here:


I hope you enjoy!!! :)
I have also been working on testing Infrablue filters for single camera NDVI in support of the work at PL and I will be posting a research note on some of the challenges I've experienced with a Canon SX230. There seems to be additional challenges with CMOS sensor cameras for this application and I'm hoping that together we can solve some of the remaining issues.
1 Comments
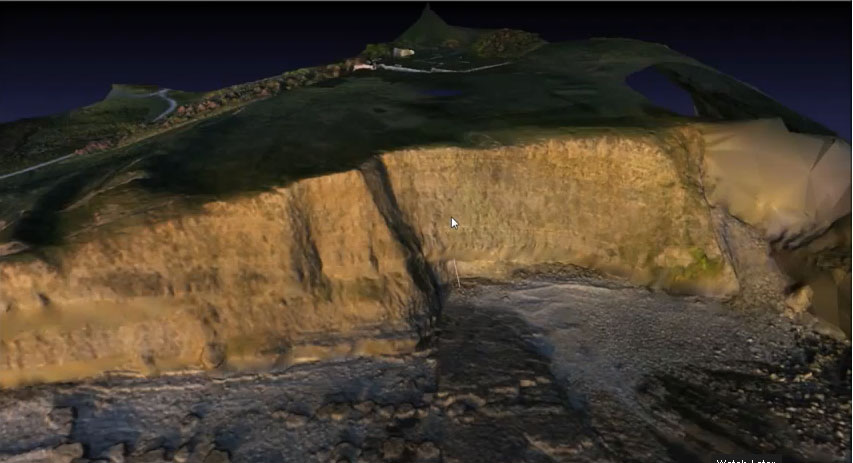
This is great. I followed the first tutorial and made a nice 3D point cloud from 76 kite photos of a tundra study plot. At Flightriot.com, Geobduffy has a zip file with everything you need to install this free software (at least on 64 bit Windows). Now I have to follow the second tutorial and make a 3D model and project the photos onto it. Then I have to figure out how to share it. Very powerful stuff.
Reply to this comment...
Log in to comment
Login to comment.